|
|
|
| Home • Toolbox functions • Sample projects • Tutorials • Downloads |
|
|
Reference for maple version: Appendix B in Multibody Mechanics and Visualization by Harry Dankowicz, published by Springer Verlag UK, 2004.
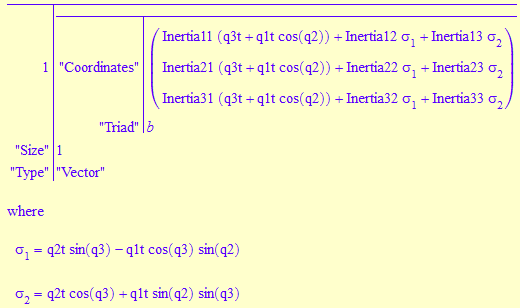
AngularMomentum(A,b)
A: name of defined observer
b: name of defined triad
The function
AngularMomentum returns the angular momentum of a rigid body with reference triad b relative to the observer A.
The angular momentum is expressed using the symbols Remember to invoke Restart():
DeclareObservers(A):
DeclarePoints(A):
DeclareTriads(a,b):
DefineObservers([A,A,a]):
DefineTriads(a,b,[q1,1],[q2,3],[q3,1]):
DeclareStates(q1,q2,q3):
AngularMomentum(A,b);
|
| ©2004-2017 Harry Dankowicz • Mechanical Science and Engineering • University of Illinois at Urbana-Champaign | Home • Toolbox functions • Sample projects • Tutorials • Downloads |