|
|
|
| Home • Toolbox functions • Sample projects • Tutorials • Downloads |
|
|
Reference for maple version: Appendix B in Multibody Mechanics and Visualization by Harry Dankowicz, published by Springer Verlag UK, 2004.
DefinePoints(A,B,pv)
DefinePoints([A1,B1,pv1], ..., [An,Bn,pvn])
A,A1, ..., An: names of declared points
B,B1, ..., Bn: names of declared points
pv,pv1, ..., pvn: vector specifications
The function
DefinePoints defines a direct relation between two declared points by specifying the position vector from the first point to the second point. A pair of indirectly related points may not be defined.
The function DefinePoints results in permanent changes to the global variables GlobalPointDeclarations and GlobalPointDefinitions.
The syntax of a vector specification corresponds to that of the argument to the MakeTranslations procedure.
Restart():
DeclarePoints(Ap,Bp,Cp):
DeclareTriads(a,b,c):
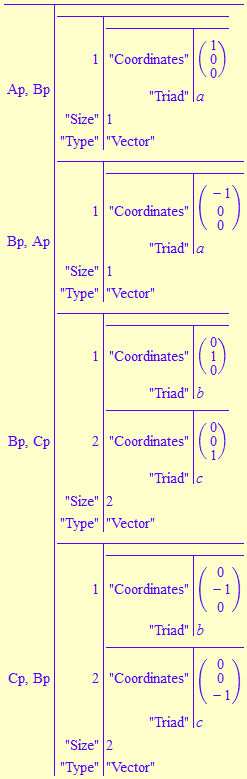
DefinePoints([Ap,Bp,a,1],[Bp,Cp,[b,2],[c,3]]):
print(GlobalPointDeclarations);
print(GlobalPointDefinitions);
|
| ©2004-2017 Harry Dankowicz • Mechanical Science and Engineering • University of Illinois at Urbana-Champaign | Home • Toolbox functions • Sample projects • Tutorials • Downloads |