|
|
|
| Home • Toolbox functions • Sample projects • Tutorials • Downloads |
|
|
Reference for maple version: Appendix B in Multibody Mechanics and Visualization by Harry Dankowicz, published by Springer Verlag UK, 2004.
MakeRotations(erms)
MakeRotations([erms1], ..., [ermsn])
MakeRotations(rm)
erms,erms1, ..., ermsn: elementary rotation-matrix specifications
rm: rotation matrix
The function
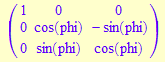
MakeRotations returns a rotation matrix as specified by its arguments.
An elementary rotation-matrix specification comes in one of two forms, namely
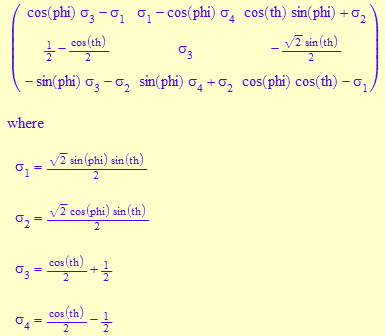
MakeRotations procedure returns the matrix product of the individual rotation matrices specified by each of the elementary rotation-matrix specifications.
MakeRotations(phi,1);
MakeRotations([phi,2],[th,1,1,0]);
|
| ©2004-2017 Harry Dankowicz • Mechanical Science and Engineering • University of Illinois at Urbana-Champaign | Home • Toolbox functions • Sample projects • Tutorials • Downloads |